上位机使用说明
1. 上位机下载与使用
Orbbec Viewer是奥比中光的3D相机上位机,用于图像与点云预览以及相机调参。
-
OrbbecViewer下载
根据你的操作系统类型与CPU架构,下载合适的上位机软件。
在Orbbec SDK代码的Release界面下载最新的上位机。
-
上位机详细的使用说明,就看这里。
注意:Ubuntu用户需要配置USB设备规则,才能正常连接设备。具体操作步骤见 第0章.概述 / 03.Gemini335连接与USB规则配置
2. 准备工作
在运行上位机之前,请仔细阅读如下几篇文章:
-
第0章. 概述 / 03.Gemini335连接与USB规则配置 -
第0章. 概述 / 04.USB基础知识与注意事项
然后确保相机插入到了电脑上面。
3. 上位机
3.1 Windows
解压软件压缩包,运行
OrbbecViewer.exe
即可。
3.2 Ubuntu
解压软件压缩包,然后进入到软件的根目录下。
右键选择从终端进入到该路径下,输入如下命令行,运行上位机软件。
./OrbbecViewer
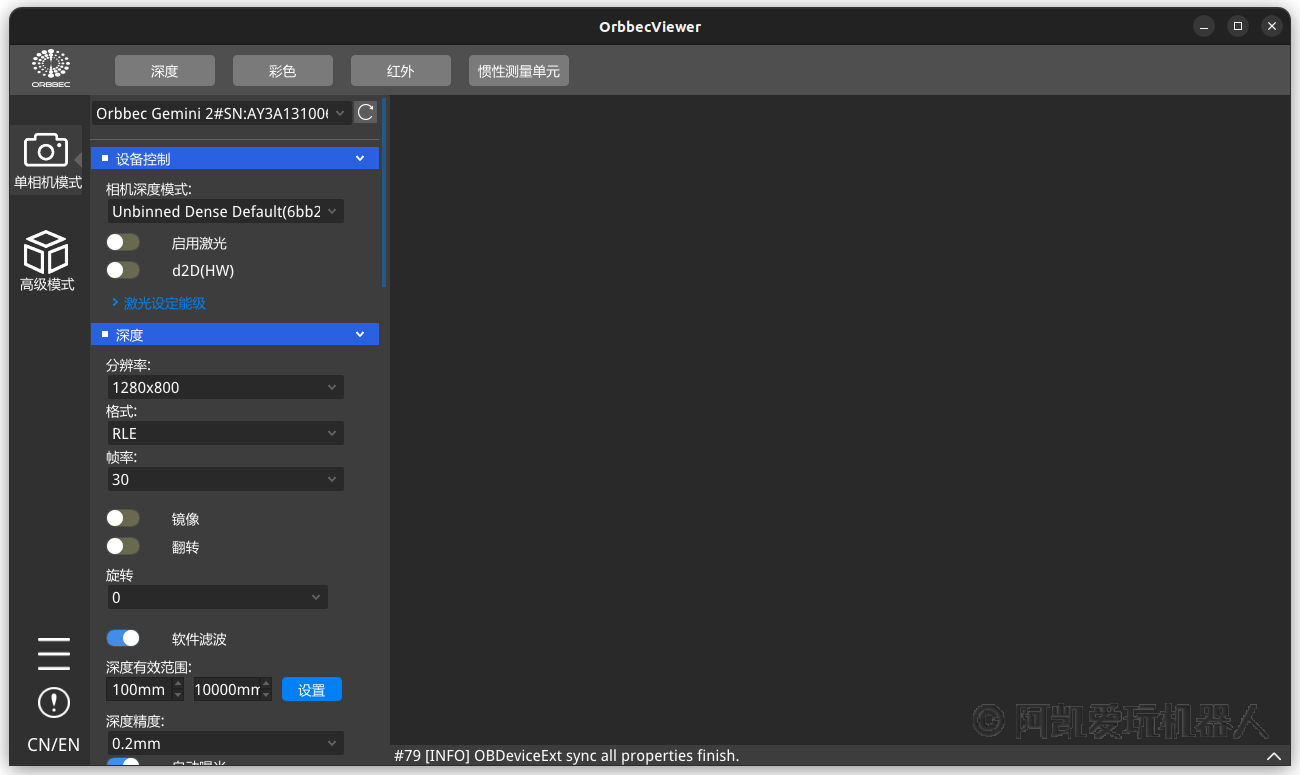
在启动上位机软件时,会先扫描有效的设备,并与之创立连接。
4. 查看USB连接类型
检查USB连接类型是否是 USB 3.0 ,如果不是请排查文章
第0章. 概述 / 04.USB基础知识与注意事项
里面相关的检查项。
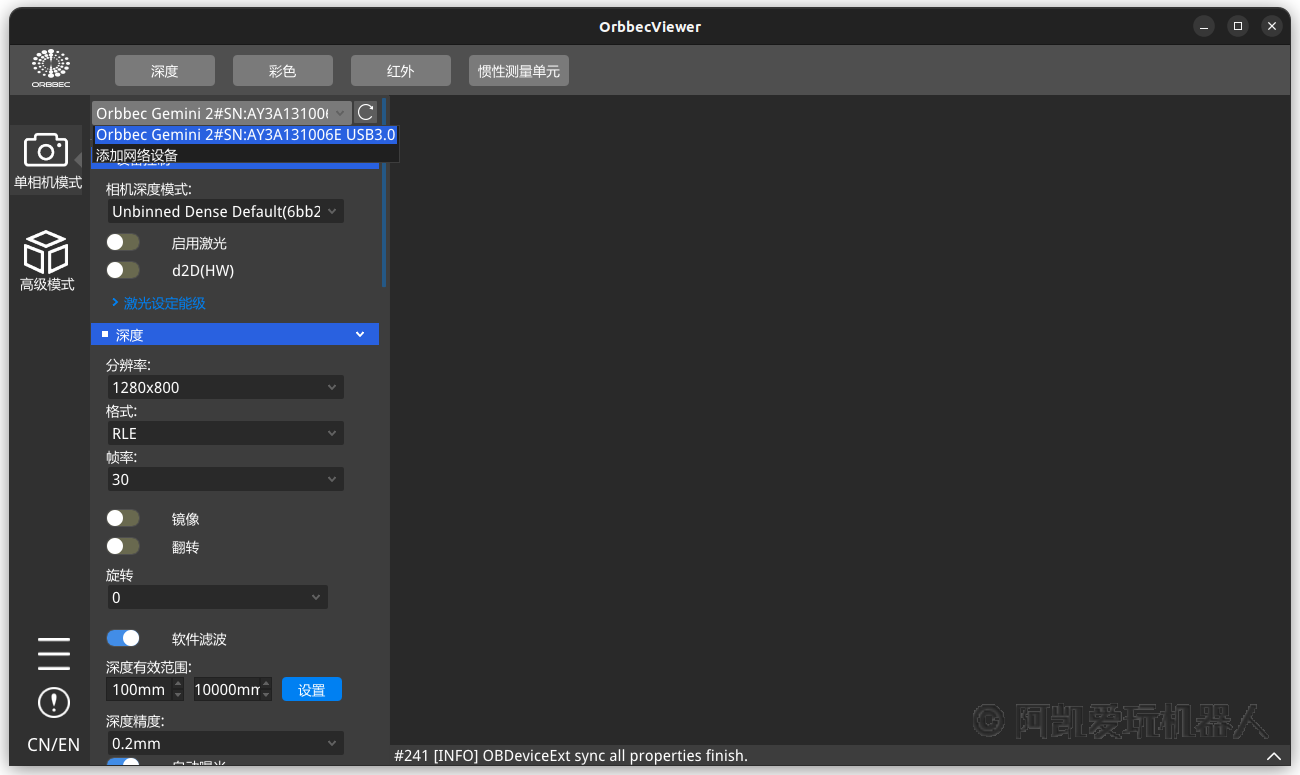
设备信息这,还有一个SN码信息,这个是设备的唯一编号,每一台相机的SN码都不一样。
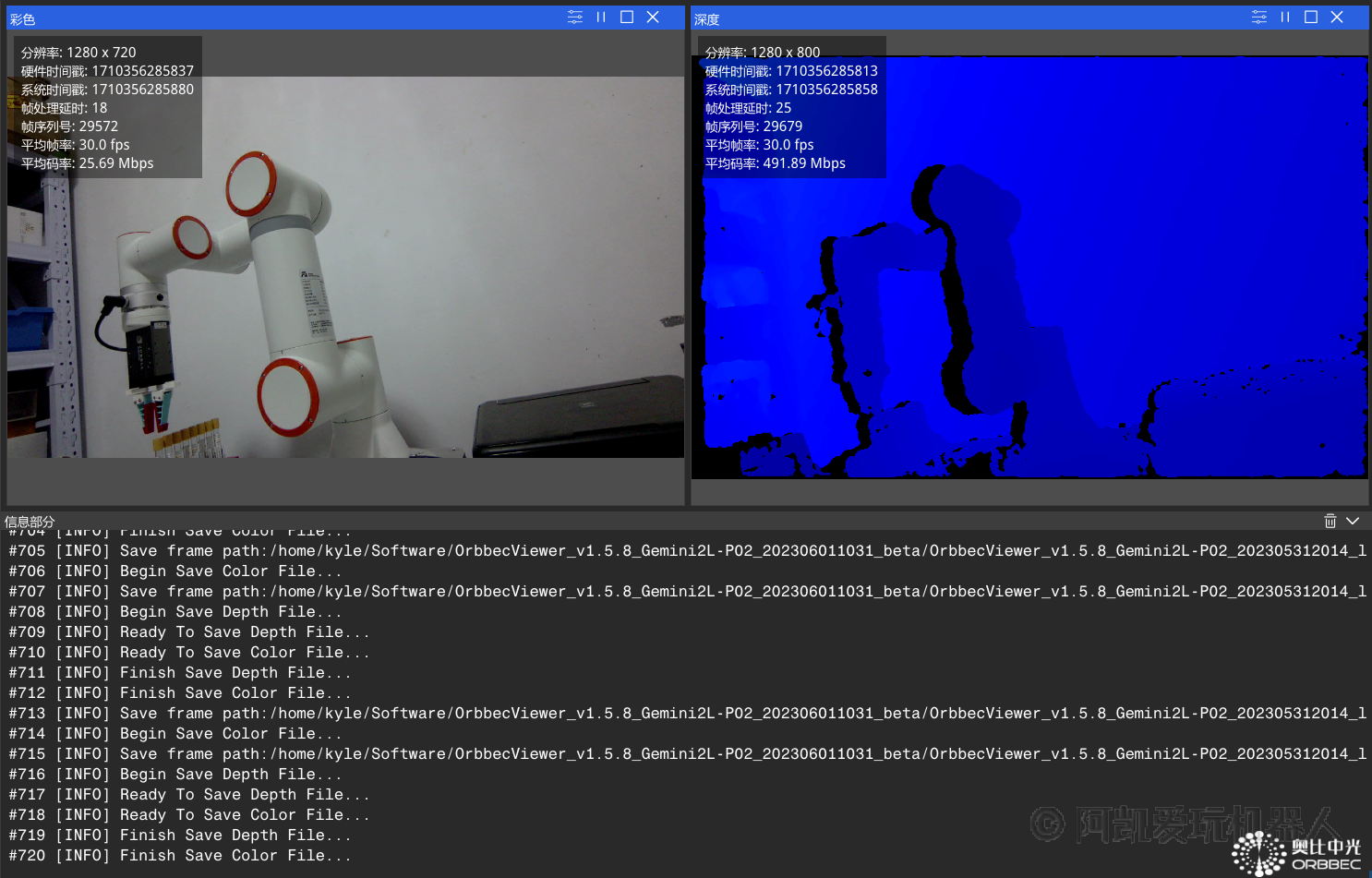
5. 彩图与深度图
5.1 彩图与深度图预览
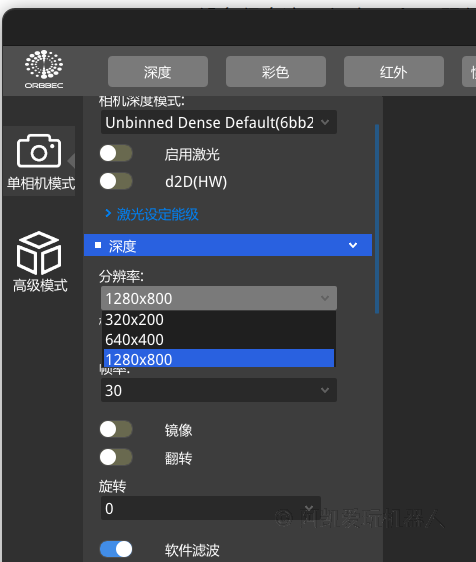
创建连接后,设置图像分辨率。
深度图分辨率选择
1280*800
。
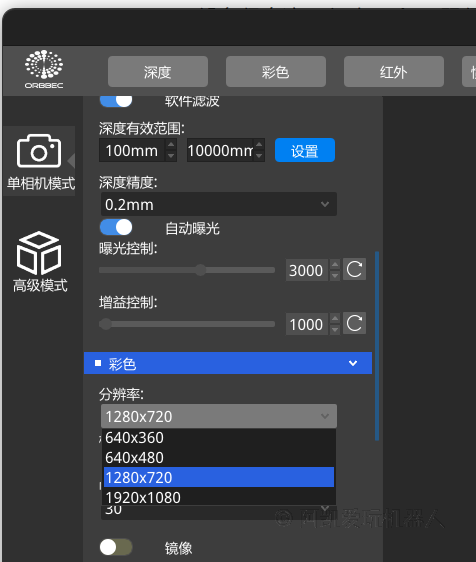
彩图分辨率选择
1280*720
。
然后点击顶部的
深度
与
彩色
就可以预览深度图与彩图。
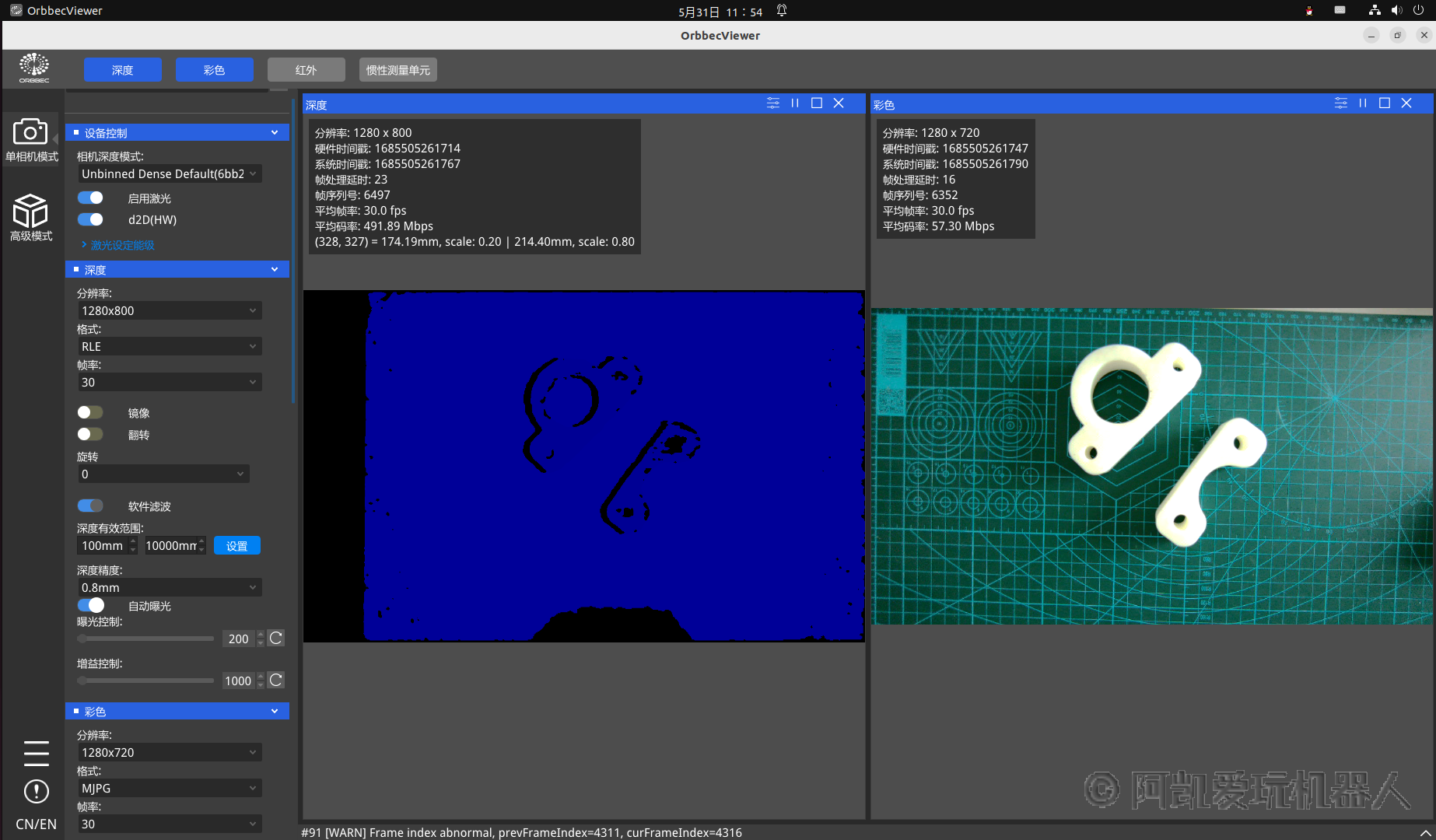
注意事项:经常会有客户问,为什么深度图只有一个颜色?
深度图本质上不是图像,而是矩阵。深度图中的每一个像素值,所代表的含义是空间中的这个点在相机坐标系下的Z轴坐标,单位是
mm。而上图中,我们看到的图像,严格意义上来说,应该称之为深度图的可视化图。渲染的颜色取决于深度图转换为可视化图像的算法,将一定的深度范围 (例如 200mm到5000mm之间) 的Z轴坐标,进行归一化,将数值范围映射为0到1。然后再将0-1区间的数值,映射匹配不同的颜色。当数值范围越大时,就意味着临近区域的颜色就接近。这个部分在上位机处是不可调的,在二次开发时,可以由自己定义。
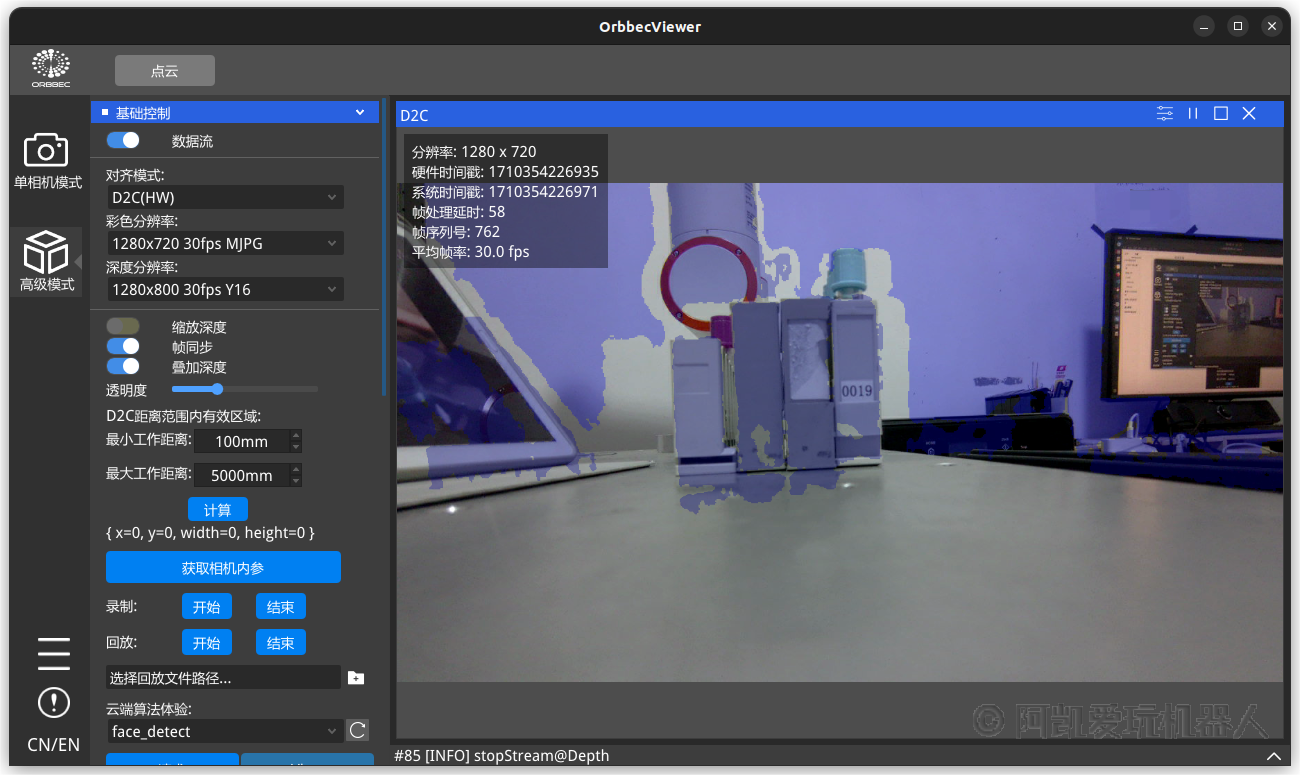
5.2 彩图叠加深度图预览
点击侧边栏的
高级模式
,对基础控制进行配置:
-
对齐模式下拉框,选择D2C(SW),软件对齐。注: Gemini335应该是不支持硬件对齐的 D2C(HW)
D2C是Depth To Color的意思,将深度图从深度相机坐标系,转换到彩色相机坐标系下。
-
彩色分辨率:选择1280x720 30fps MJPG -
深度图分辨率:选择1280x800 30fps Y16 -
帧同步:打开 -
叠加深度:打开 -
透明度:自己任意调整。

最后勾选上方的
数据流
开关。然后你就可以看到下面的图像,深度图按照一定的比例添加到彩图上,更加直观。
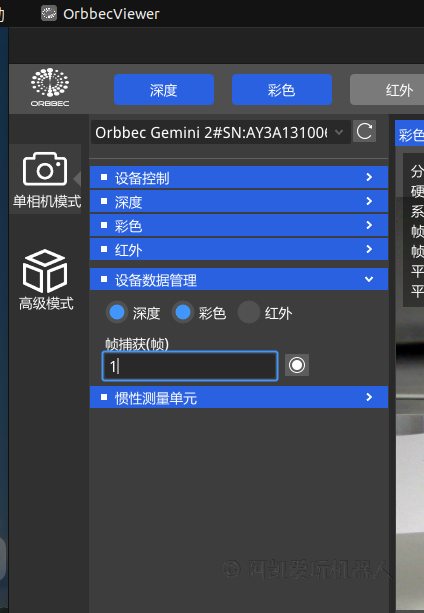
5.3 图像采集
-
单相机模式里面找到设备数据管理。 -
勾选你需要采集的数据,例如
彩图。 -
编辑我们需要捕获的帧数,这里修改为
1。 - 按下右侧的图像采集小按钮。
同样,你可以在日志输出栏看到图像保存信息。
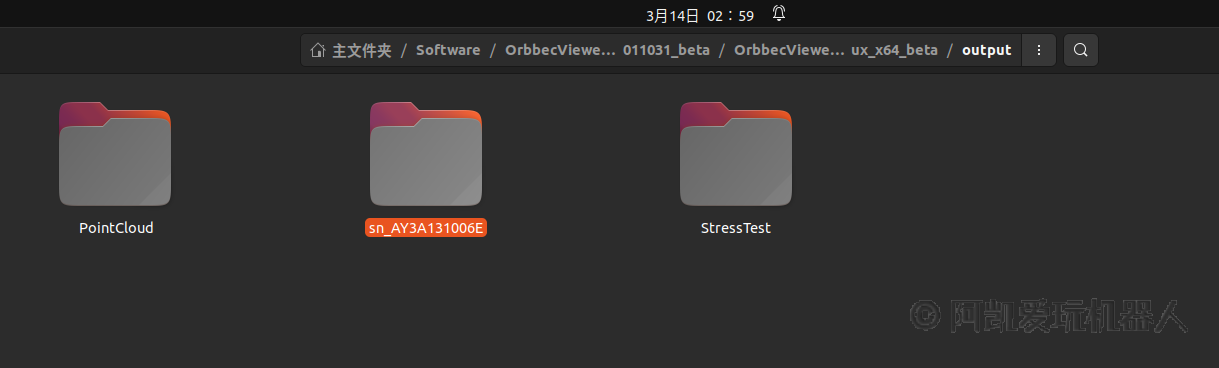
在上位机软件文件夹的
output
目录下,可以看到以设备的SN码创建了一个文件夹。
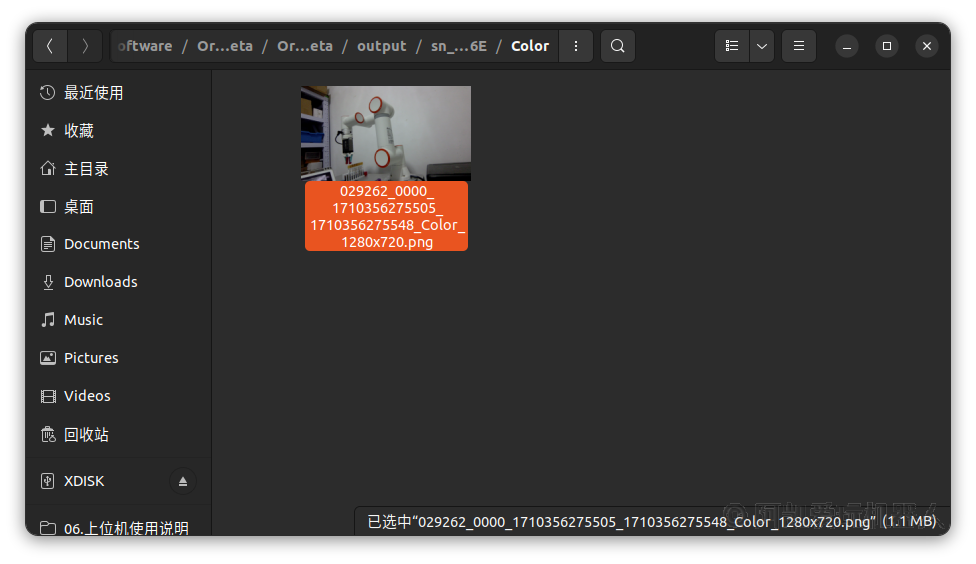
在
Color
文件夹下,就可以看到刚刚采集的彩图啦:
6. 点云
6.1 点云预览
在
高级
模式里面,找到
点云
配置项位置。
配置彩色分辨率与深度分辨率
-
彩色分辨率:选择1280x720 30fps MJPG -
深度图分辨率:选择1280x800 30fps Y16
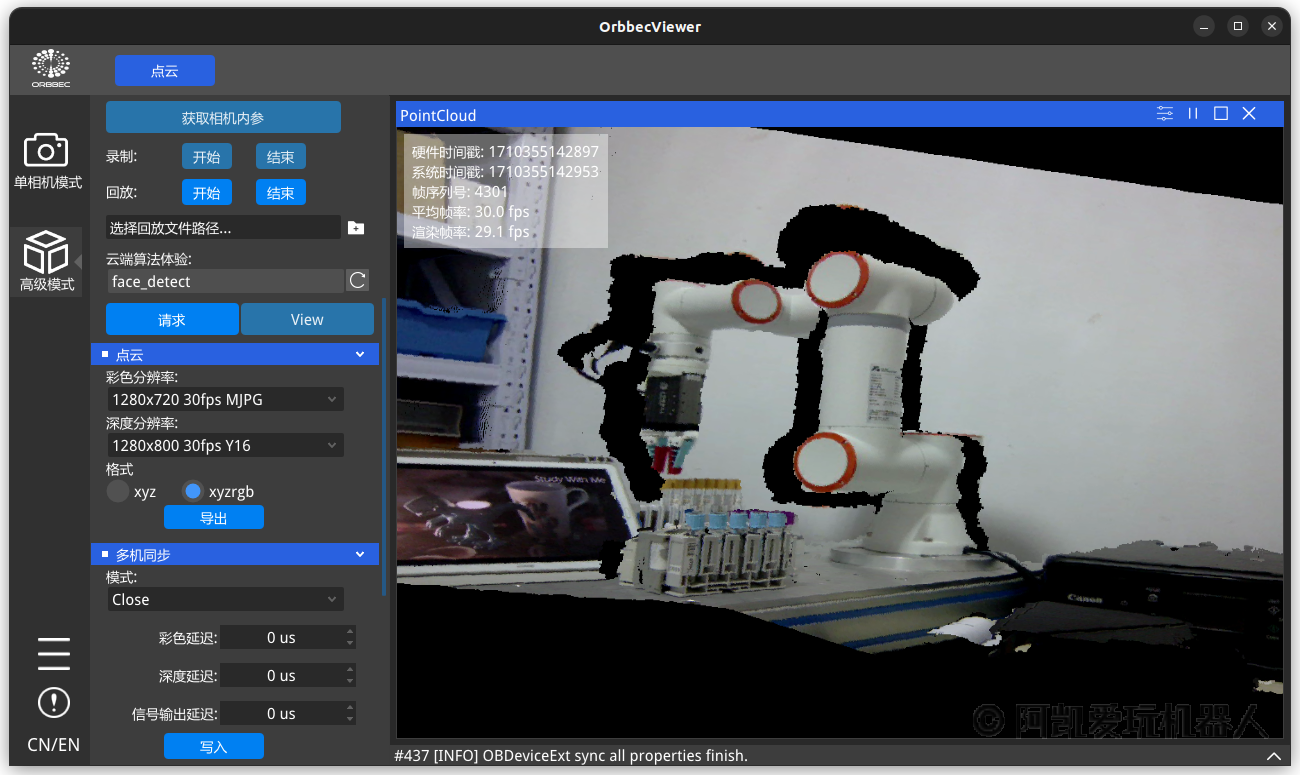
格式
选择彩色点云
xyzrgb
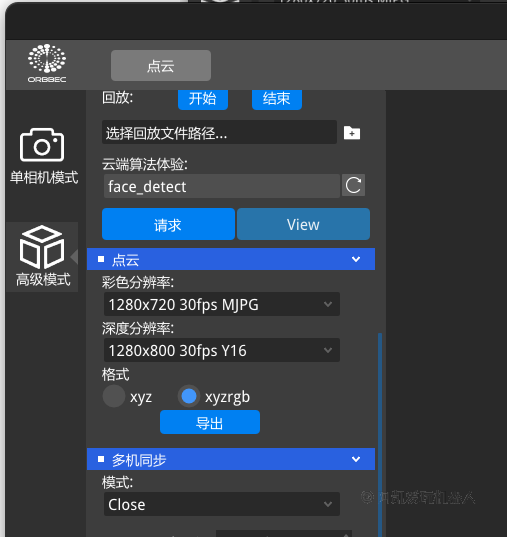
点击顶部的
点云
按钮,就可以预览点云。
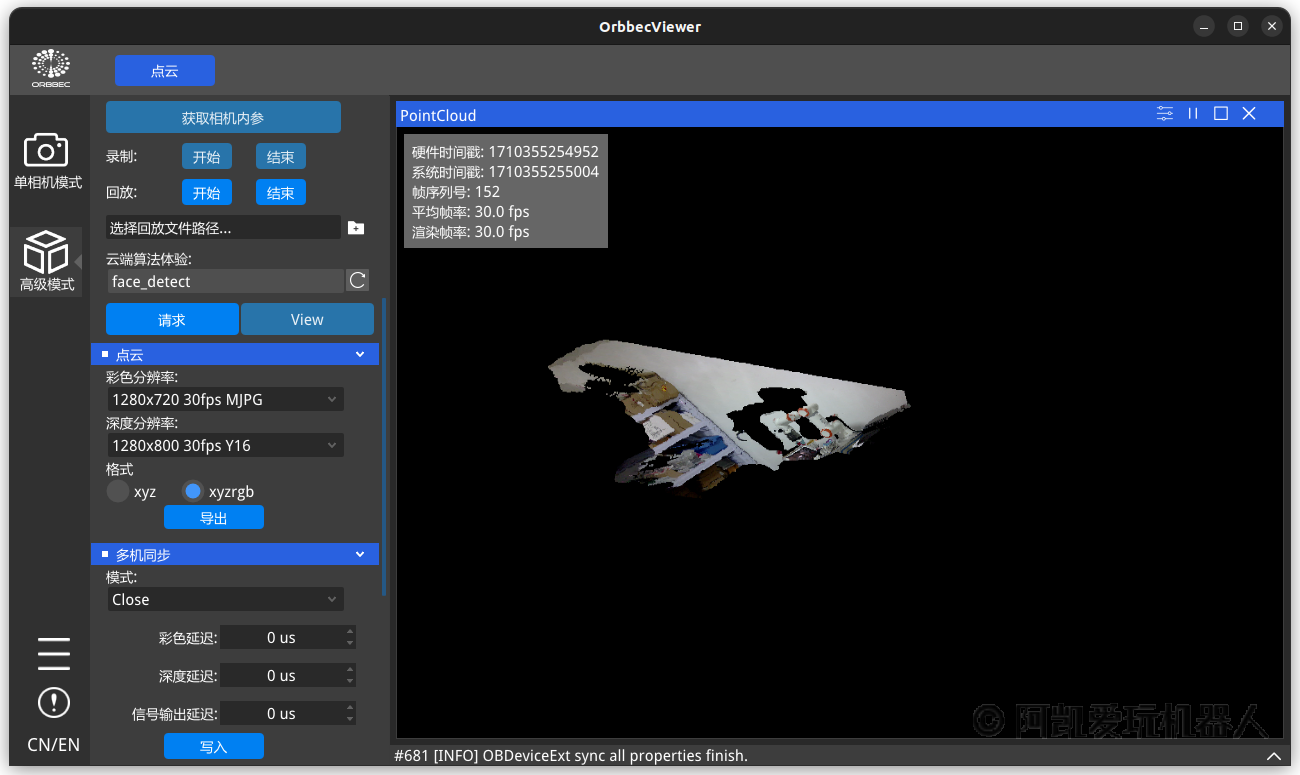
快捷键介绍
- 鼠标左键:调整视野
- 鼠标滚轮:缩放点云
如果你看到的点云只有一点点或者过大,可以用鼠标滚轮进行缩放与调整。
调整后的点云数据预览:
6.2 点云导出
点云栏里面有一个
导出
按钮。
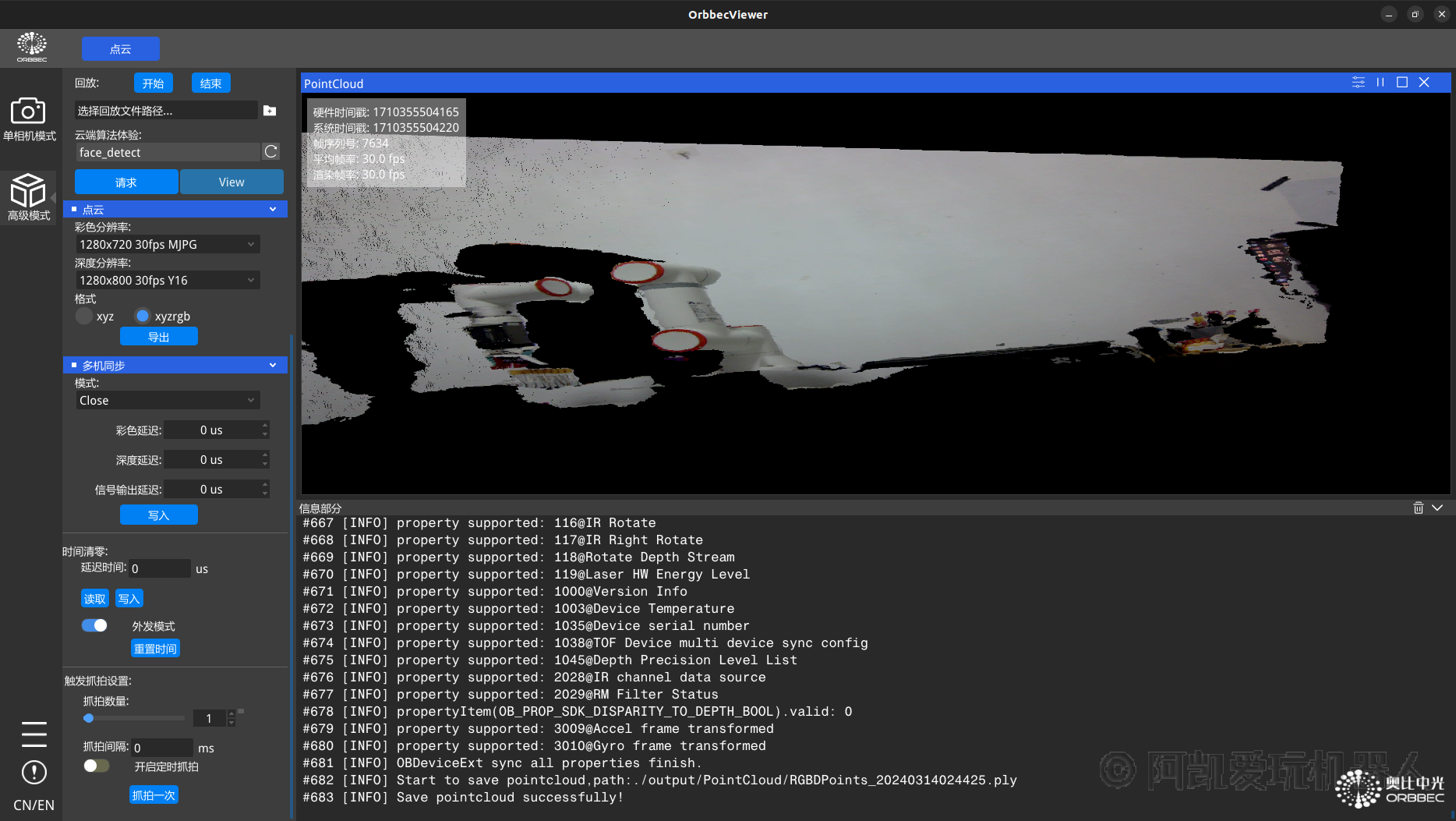
仔细看日志信息,里面有讲把点云数据 (
.ply
格式) 存放到了哪里
#682 [INFO] Start to save pointcloud,path:./output/PointCloud/RGBDPoints_20240314024425.ply
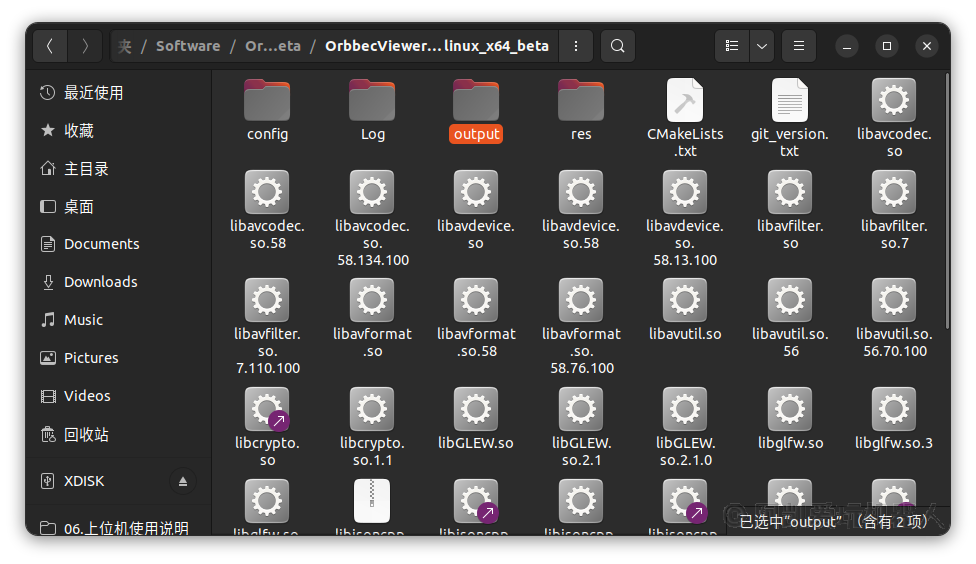
我们可以在软件包的对应路径下找到保存的数据。
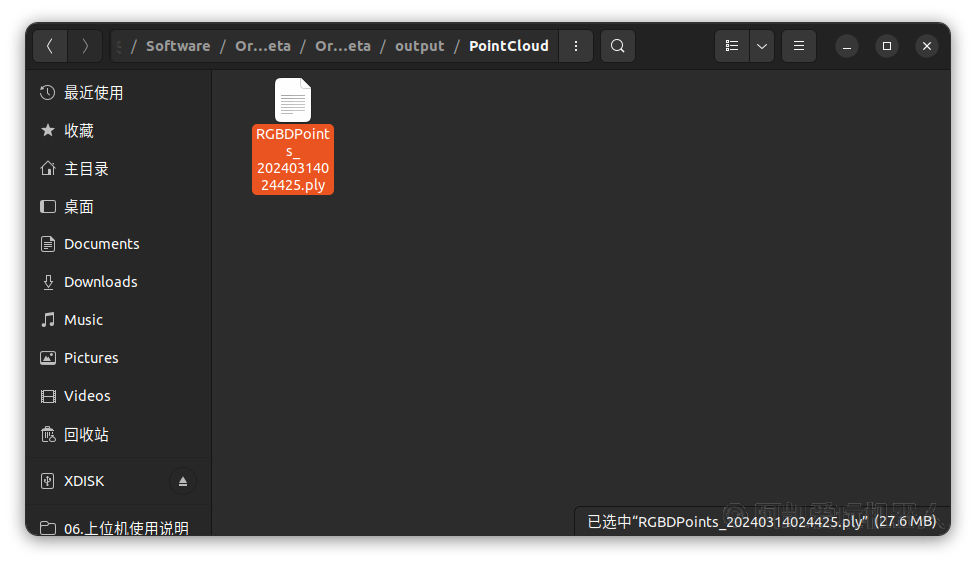
你可以用任意的3D点云预览 / 标注的第三方软件打开这个
.ply
文件。
这个是我用Open3D打开这个点云数据的效果。
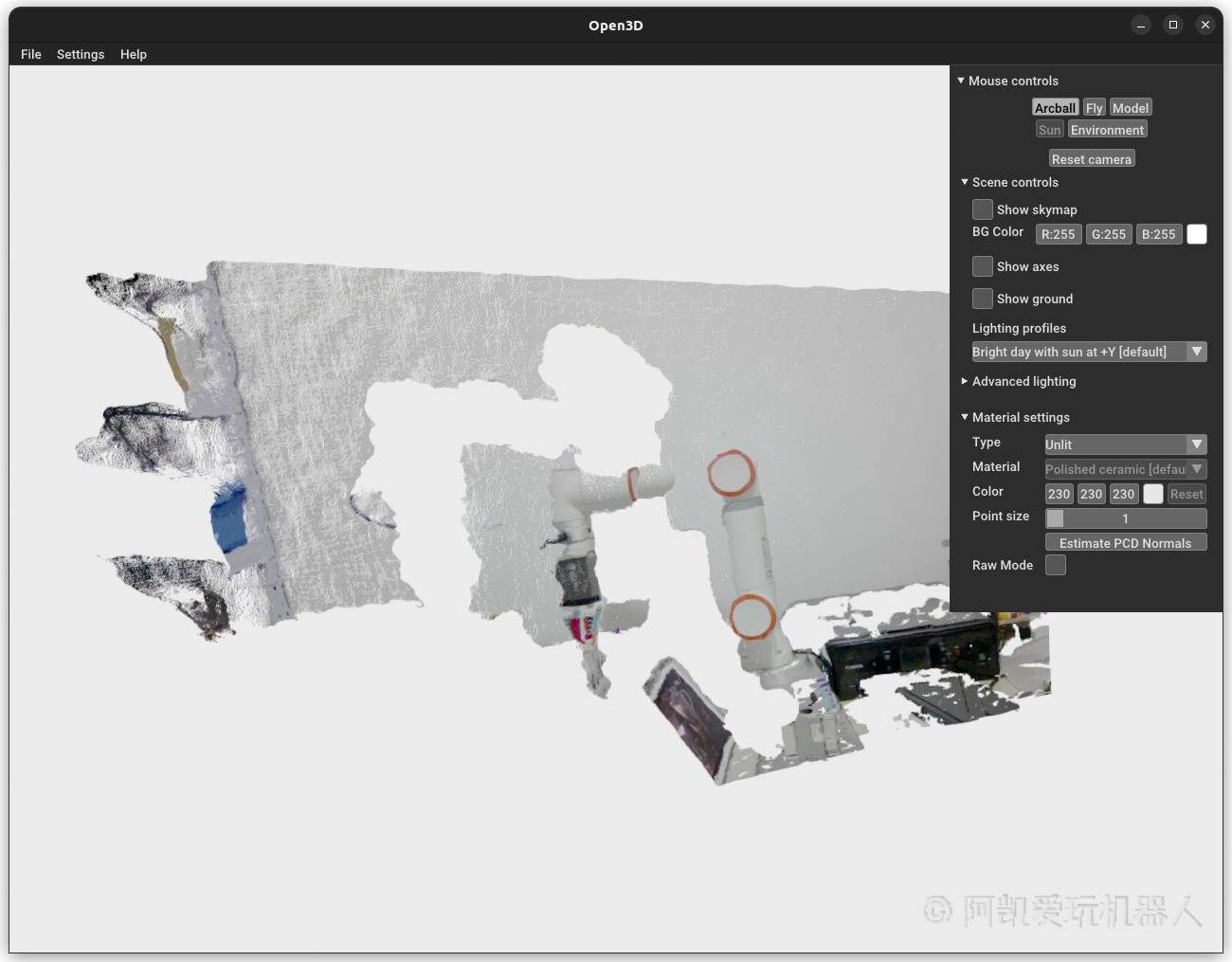
Open3D上支持更多的渲染方法与视角调整方式,比奥比自带的点云预览更方便。
7. 深度图质量调整
如果没有特殊情况,深度相机优先选择
自动曝光
。
如果自动曝光不能满足你的要求,画面中有大面积的无效深度,则可以尝试关闭
自动曝光
选项,然后调整如下参数:
- 曝光控制
- 增益控制
一般情况下,这两个参数数值越小,深度图质量越好。根据自己实际情况进行调整。
另外,你还可以尝试:
- 调整物体与相机之间的距离
- 添加补光灯,改善光照条件