Gemini335官方软件生态与独家教程获取方法
1. 概要
本文介绍了奥比中光官方的软件生态,以及我们 独家付费自研教程 的获取方法。
可以对照奥比中光的官网文档,结合我们的文档一起看。
注意事项 :
- 阿凯目前只提供自研Python Open3D SDK以及奥比中光官方Python SDK (pyorbbecsdk) 的相关技术支持。
- 奥比中光的其他语言版本需要自己对照官方文档学习,由奥比中光官方提供技术支持。
2. 官方手册
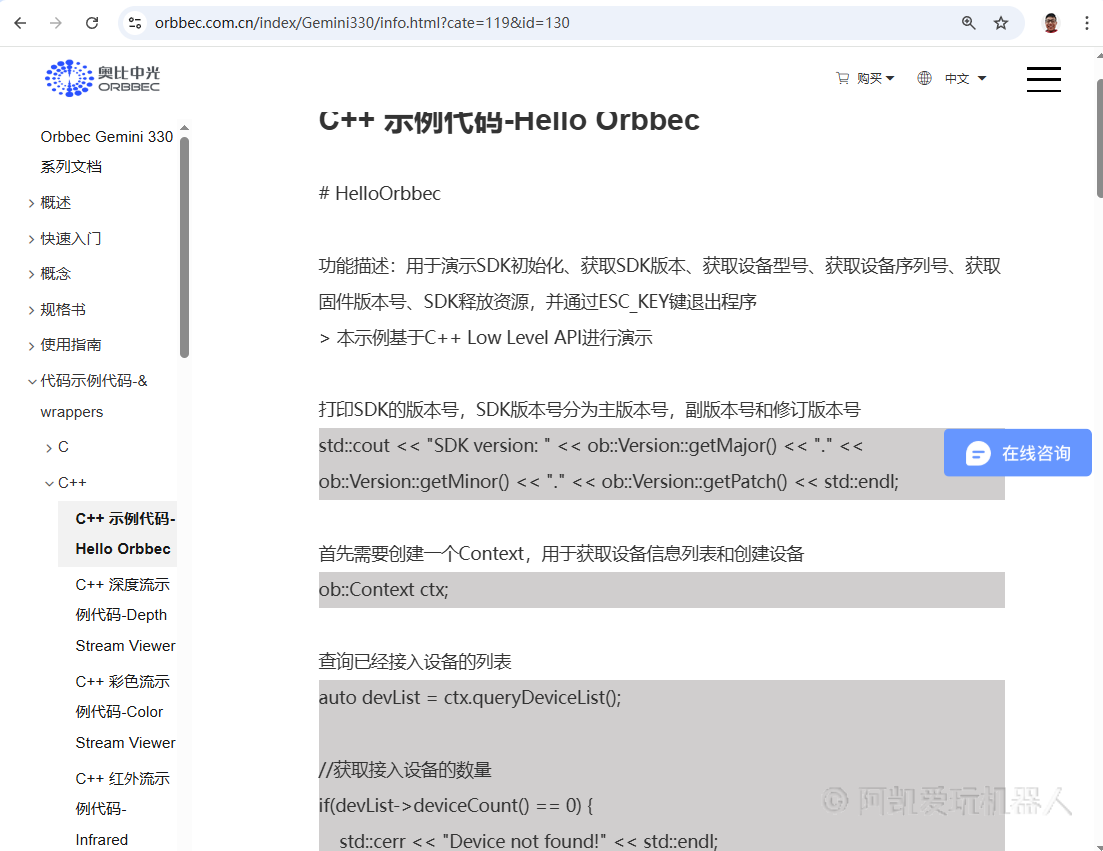
Orbbec Gemini 330 系列文档
https://www.orbbec.com.cn/index/Gemini330/info.html?cate=119&id=74

可以在官网文档下载如下内容:
-
Gemini330系列产品手册
https://www.orbbec.com.cn/index/Gemini330/info.html?cate=119&id=100
-
相机CAD模型
https://www.orbbec.com.cn/index/Gemini330/info.html?cate=119&id=174
-
相机相关的概念说明
3. 上位机调试软件
3.1 上位机下载与使用
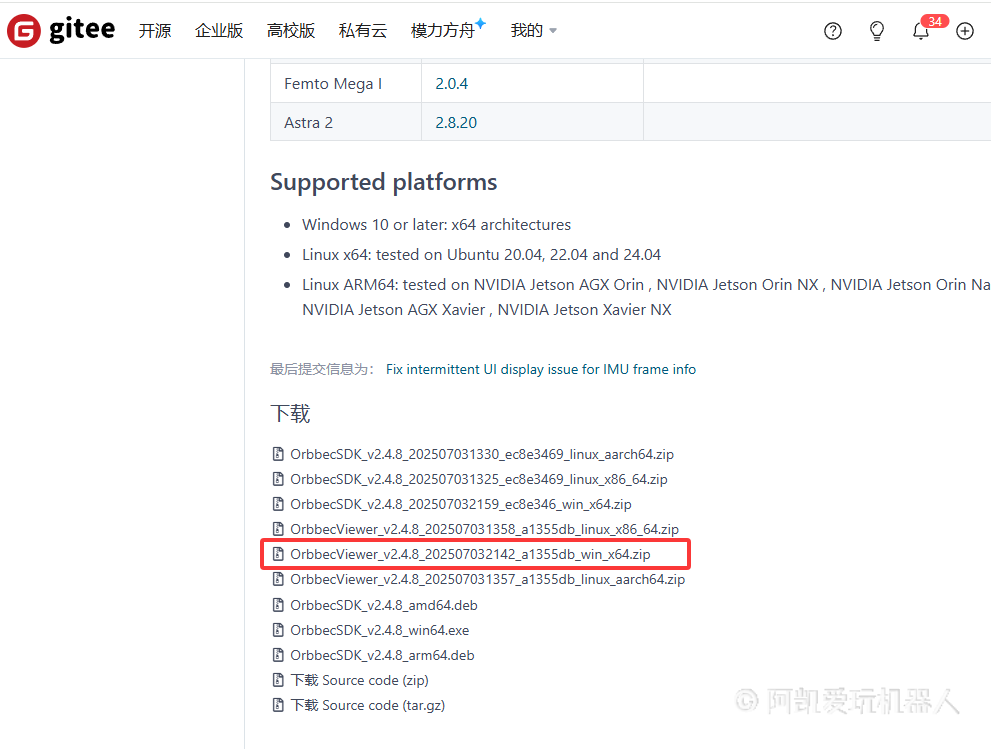
Orbbec Viewer是奥比中光的3D相机上位机,用于图像与点云预览以及相机调参。
-
OrbbecViewer下载
根据你的操作系统类型与CPU架构,下载合适的上位机软件。
在Orbbec V2 SDK代码的Release界面下载最新的上位机。
-
OrbbecViewer 使用手册
上位机详细的使用说明,就看这里。
注意事项 :Ubuntu用户需要配置USB设备规则,才能正常连接设备。具体操作步骤见 第0章.概述 / 03.Gemini335连接与USB规则配置
4. 独家付费自研教程
我们在奥比中光官方Orbbec SDK的基础上做了二次开发,简化了IO读取的操作,适配了Open3D点云处理库。另外在阿凯机器人工具箱里面还提供了点云处理相关函数的封装以及配套学习案例。
由于资料教程的特殊性,需要确认收货后联系客服发送,开通课程权限或加入课程群后不支持退款。
4.1 独家教程获取方法
收到相机后,通过上位机预览彩图、IR红外图、深度图、点云。如果确认相机没有质量问题,不会发生退货退款,进行如下步骤。
- 在淘宝上点击确认收货。
- 使用PC端浏览器,访问 阿凯爱玩机器人 在线课程平台( http://1zlab.deepsenserobot.com/ ),右上角微信扫码登录。
- 把网站上的个人ID号发送给淘宝客服,客服开通课程权限。
- 添加阿凯老师QQ:244561792,发送自己的订单截图给阿凯。阿凯邀请你进入售后支持群。
群里面的压缩包里有如下内容:
- 自研Python SDK,集成在阿凯机器人工具箱里面。
- 综合学习案例,包括OpenCV图像处理与Open3D点云处理案例。
- 脚本工具。
- 相机产品规格书
如果使用过程中有问题,可以在群里问或者私聊,提供答疑。
5. 二次开发
目前我们只提供自研3D相机Python SDK还有自研案例的技术支持。奥比中光的官方二次开发生态,不在技术支持范围内,需要自己结合官方手册/案例来看, 由奥比中光官方提供技术支持。
奥比中光的二次开发相关的软件生态,都可以在Gitee上的首页下载。
https://gitee.com/orbbecdeveloper
5.1 支持的操作系统
适用于如下操作系统:
-
Windows
102018年4月 (版本1803) 之后的操作系统发行版本。
-
Windows
11 -
[推荐] Ubuntu
24.04 -
Ubuntu
18.04 -
Ubuntu
20.04 -
Ubuntu
22.04
5.2 C/C++ SDK
-
C++ SDK 下载
代码仓库:
在release界面下载编译好的动态链接库:
-
5.3 Python SDK (pyorbbecsdk)
-
Python SDK下载
代码仓库:
选择
v2-main分支, 压缩包里面还有pyorbbecsdk的测试样例。git clone --depth 1 --branch v2-main https://gitee.com/orbbecdeveloper/pyorbbecsdk.git -
Python SDK 使用手册
关于pyorbbecsdk更加详细的使用说明,还可以参考阿凯写的pyorbbecsdk相关章节。
5.4 ROS SDK
Orbbec ROS SDK 是 OrbbecSDK 的 ROS wrapper,支持ROS发行版:Kinetic,Melodic,Noetic。
-
代码仓库:
选择
v2-main分支git clone --depth 1 --branch v2-main https://gitee.com/orbbecdeveloper/OrbbecSDK_ROS1.git -
Orbbec SDK for ROS 使用手册
见
OrbbecSDK_ROS1的README.mdhttps://www.orbbec.com.cn/index/Gemini330/info.html?cate=119&id=152
5.5 ROS2 SDK
支持ROS2发行版:Humble。
-
代码仓库:
选择
v2-main分支git clone --depth 1 --branch v2-main https://gitee.com/orbbecdeveloper/OrbbecSDK_ROS2.git -
Orbbec SDK for ROS2 使用手册
见
OrbbecSDK_ROS2的README.mdhttps://www.orbbec.com.cn/index/Gemini330/info.html?cate=119&id=157