Gemini335相机规格与常见问题汇总
0. 概要
在咨询相机相关的问题之前,请先阅读下面的常见问题+回复 (Q&A) 。下面的问题基本上覆盖了大部分的咨询场景。
由于我们的课程均以文档形式呈现,需要您有一定的文档阅读能力,对于已经罗列的咨询问题,客服将不予回复。
1. 相机采购类
1.1 相机购买链接
相机购买链接: 奥比中光双目深度相机3d体感摄像头rgbd立体结构光gemini2摄像机

2.2 对这样的客户说不 !
我们不提供手把手的相机使用教学,以自己看文档为主。
如果你属于下面的这几类客户,我们不希望你购买我们的硬件/软件服务!
- 如果你没有编程基础,之前没有学过Python,或者Python刚刚入门。
- 如果你只想用消费级3D相机的预算,来做工业级3D相机的事。
- 如果你是伸手党,以自己项目着急为由,说自己没有时间去研究,用频繁的问问题替代文档阅读,不尊重我们技术支持人员的时间。
- 如果你是工厂老板,没有研发能力,工厂也没有相关研发人员,觉得买了就可以解决自己的问题。
- 如果你研发能力不足,但是非常固执,按照自己的想法来,不按我们建议的 路线 / 技术栈 / 工具链 去学习相机使用。
我想说:
-
你首先要学会 自己学习并解决问题 ,通读我们编写的文档是最快的途径。我们不会替你去做你自己该做的事。
-
除相机硬件故障外,我们 不提供远程协助服务 。也不会帮你找自己写的BUG。
开发环境配置部分,我们文档里已经做了非常详细的讲解。开发环境配半天也配不好,多半是缺乏编程基础,着急也没用,仔细看我们的文档或自行百度。
出现报错了,我希望你做的第一件事情是拷贝关键报错信息到百度上搜一下。
-
我们 不提供行业解决方案 ,当我们说相机xx型号适合什么样的场景时,不代表我们会给你提供对应的解决方案。
相机只是采集图像/点云,其他的 需要自己开发 ,或者是自己找开源库去适配。
-
技术支持范围 仅限于详情页 范围内。详情页以外的资料我们不提供,也不提供答疑。
-
请自行入门Python,我们 不负责Python基础问题的答疑 。Python的视频课程在B站上有很多,我们的官网上也有公开的Python科学计算入门课。
推荐Python版本:Python3.10,Python开发环境配置:
Python开发环境配置(Windows) - Python科学计算 (deepsenserobot.com)
我们很多示例代码是基于Jupyter Notebook编写的,你需要学习Notebook使用 :
Jupyter交互式WebIDE - Python科学计算 (deepsenserobot.com)
不要用VSCode或者PyCharm去运行测试notebook脚本。
2. 相机规格信息
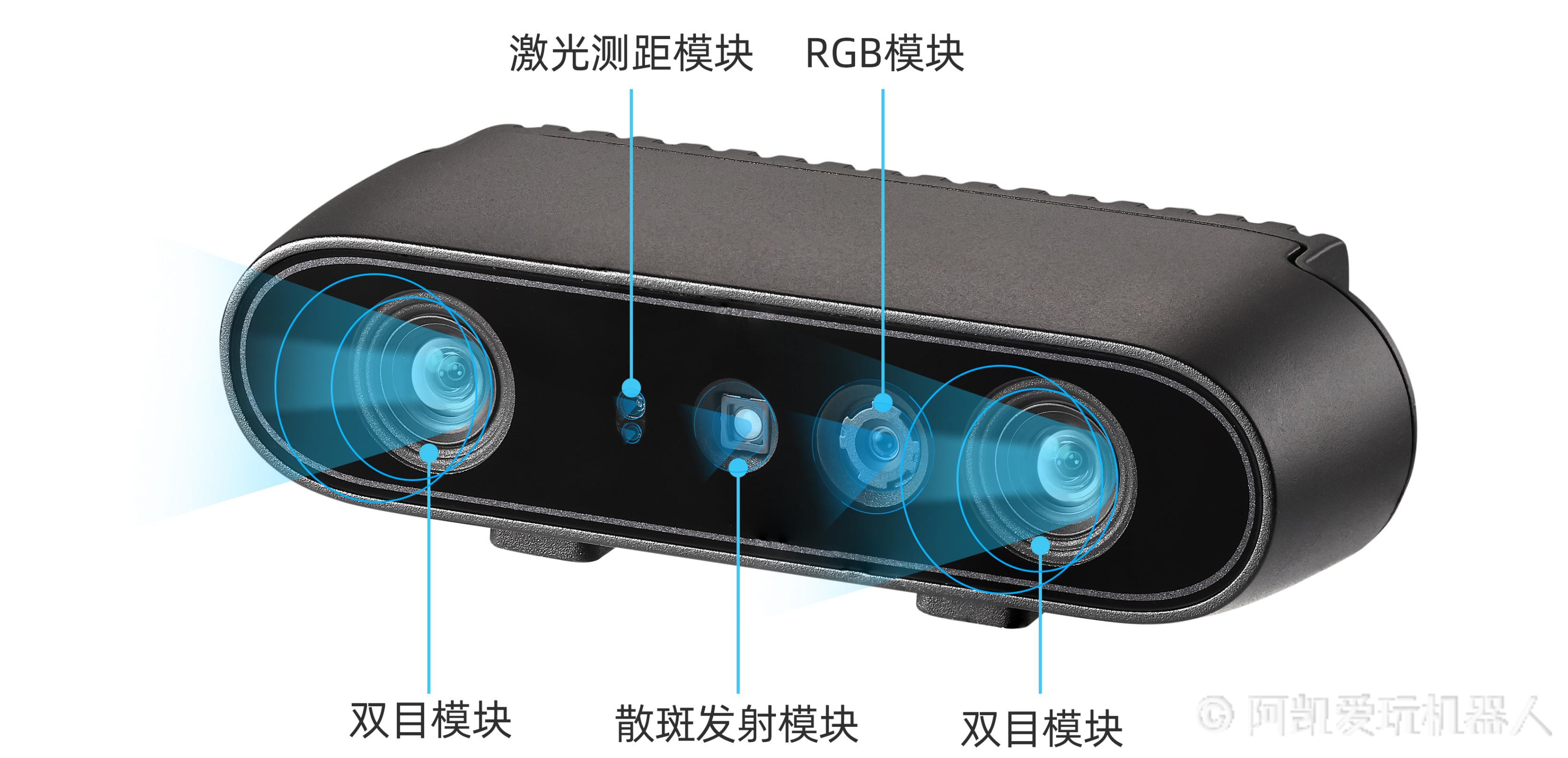
2.1 Gemini335组件与相机成像原理 ?
Gemini335属于双目红外散点结构光3D相机,配备高性能主被动融合双目成像系统。双目指的是相机有两个红外相机,一个彩色相机。
-
RGB模块 :采集彩图
RGB彩色成像模组,使用的是卷帘式快门,移动会有运动模糊。
-
散斑发射模块 (LDM) :在场景中透射红外散斑结构光,从而增加物体表面本身的纹理信息。
注:红外光人眼不可见
-
双目模块 :双目模块使用的两个红外相机。
红外相机模组使用的是全局快门类型,对物体移动或者相机移动拍摄场景有很好的表现。
-
激光测距模块 (LRM) :用于补充相机近距离的深度盲区
测距范围 0.001m - 0.4m
相机底层固件不开源,你可以单独采集左右两个相机的红外图像,但是我们一般不这么用。
如果是研究三维成像的客户,建议自己搭建双目+结构光的硬件。
2.2 相机基础参数
同时获取彩图与深度图的最大分辨率为:
| 参数名称 | 彩图 (RGB相机) | 深度图 (红外相机) |
|---|---|---|
| 分辨率 | 1280 * 720 | 1280 * 800 |
| 宽高比 | 16:9 | 16:10 |
| 帧率 (USB 3.0) | 30fps | 30fps |
| 视场角FOV | H86° / V55° / D94°±3° | H90° / V65° / D100°±3° |
| 工作距离 | 0.39m-正无穷 | 0.26-10m |
| 推荐工作距离 | / | 0.26-3m |
注:
- 深度图对齐后 (D2C) 的 FOV 与 RGB 相机的 FOV 一致:H86° / V55° / D94°±3°
-
彩色相机景深范围是
0.39m-正无穷,因此拍摄距离小于0.39m的位置,采集的彩图是有一点点模糊的。
视场角参数说明:
-
H:HFOV 水平视场角 -
V:VFOV 纵向视场角 -
D:DFOV 对角线视场角
2.3 相机精度
奥比中光Gemini335系列的相机是专门针对机器人场景开发的。
相机点云精度是一个涉及多方面的问题:
-
相机拍摄距离
奥比中光手册里标称的Gemini335相机在2m拍摄距离时,绝对定位精度为±2%。
绝对定位精度: 2000mm * 2% = 40mm实际上我们在机械臂视觉抓取场景中Gemini335拍摄距离一般在26cm - 50cm左右,此时的绝对定位精度在 ±1-3mm 左右。
拍摄距离越远,误差越大,点云波动范围越大,点云缺失也越大。
-
环境光照强度
当环境光充足的条件下,画面中物体本身的纹理信息可以更好的被检测到,从而可以增强深度图质量。当环境光较暗的情况下,可以增加额外的补光灯。
-
物体表面反射率
如果是金属反光表面或者半透明物体表面,相机可以拍,但是在这个情况下,点云噪声或者说波动范围要比常规物体表面要大一些。
如果你是用在科研领域,做机械臂视觉抓取实验,对点云精度要求没那么高的场景,1-3mm左右的点云波动/误差是可以接受的。 那么Gemini335这款产品就是适合你的。
如果你的项目是工业场景应用,且对精度要求非常高的场景,建议选择我们销售的工业3D相机产品,例如 跨维的Xema系列 。场景举例:
- 工件非常小的情况
- 高精度的尺寸测量
- 高精度的工件装配场景
- 焊接等恶劣工况,有电磁干扰场景
如果你拿不准,可以咨询客服。我们可以帮你做评估,你也可以给我们邮寄样品,我们帮您用相机拍摄样例点云。
小提示:很多3D相机厂家的参数都会虚标,所以直接看拍摄的点云数据是更加直接的方式。
2.4 可以拍什么样的物体表面 ?
Gemini335除了可以用于拍摄一般物体以外,还可以用于行业普遍的难点,包括:金属反光表面 / 纯黑物体 / 半透明物体。同时还可以用于拍摄相对较小的物体。
2.5 对光照环境的要求? 能否用于户外 ?
Gemini335系列支持在 室内 / 户外 / 夜晚 / 白昼 等多种光照条件下使用,提供准确可靠的数据。
- Gemini335L 无惧强光,可以用在户外阳光直射的场景。
- Gemni335 只能用于室内与半户外场景。如需用在户外强光环境,则需要遮光处理。
2.6 相机工作距离与幅面计算
相机工作距离,指的是被拍摄物体距离相机坐标系
Z
轴上的距离。在不同的深度图分辨率下,最近拍摄距离是不同的。
在
1280 x 800
深度图分辨率下
-
实际工作距离:0.26m - 10m
-
推荐工作距离: 0.26m - 1 m
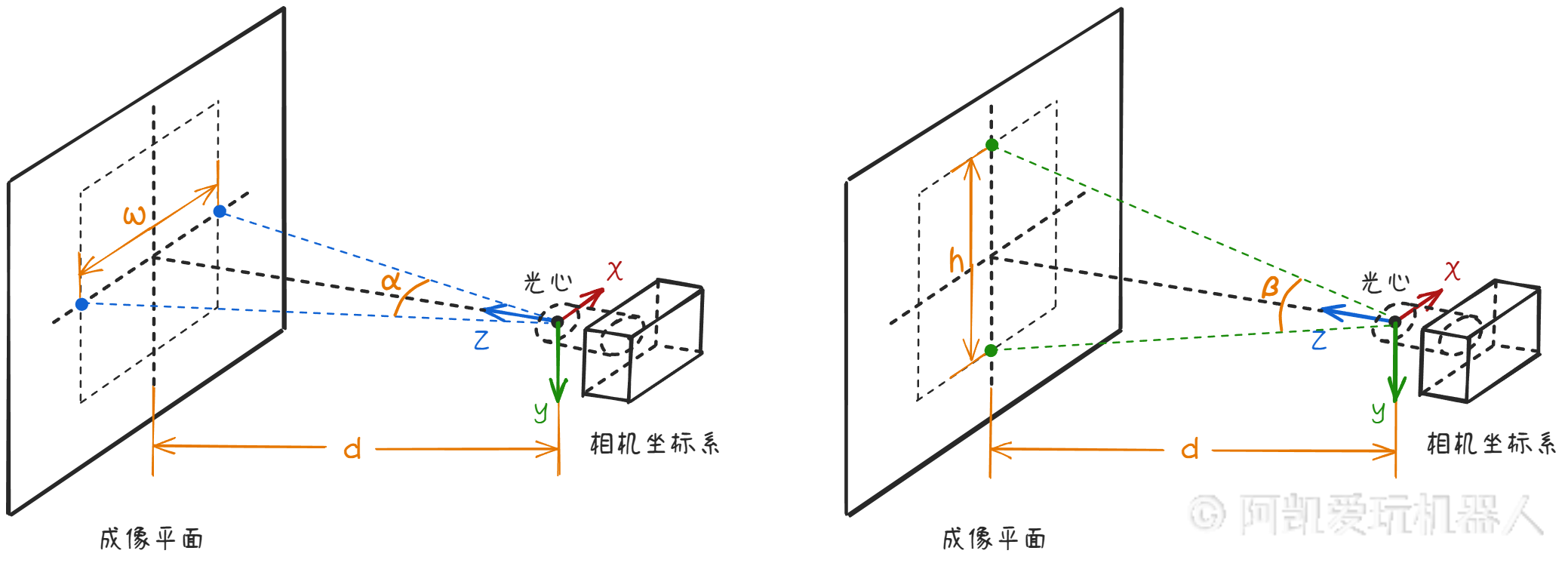
定义变量:
-
-
-
-
-
根据FOV以及工作距离,来计算相机幅面的公式:
常见的拍摄距离与RGB相机视场幅面的映射关系:
| 工作距离 (单位mm) | 视场 (单位mm) |
|---|---|
| 260 | 335 x 233 |
| 300 | 386 x 268 |
| 400 | 515 x 358 |
| 500 | 644 x 447 |
| 1000 | 1288 x 895 |
| 1500 | 1931 x 1342 |
| 2000 | 2575 x 1790 |
| 3000 | 3863 x 2685 |
计算视场的Python脚本
import math
HFOV = 86.0 # RGB相机横向视场角(单位°)
VFOV = 55.0 # RGB相机纵向视场角( 单位°)
def get_view_field(z_distance):
w = 2*z_distance*math.atan(math.radians(HFOV/2))
h = 2*z_distance*math.atan(math.radians(VFOV/2))
return w, h
# 拍摄距离为150mm的时候的幅面
get_view_field(150.0)
2.7 外观尺寸与重量 / STEP模型
| 相机型号 | 重量 | 宽度 (mm) | 高度 (mm) | 深度 (mm) |
|---|---|---|---|---|
| Gemini335 | 95g | 90 | 25 | 30 |
| Gemini335 L | 133g | 124 | 29 | 27 |
主视图尺寸标注:
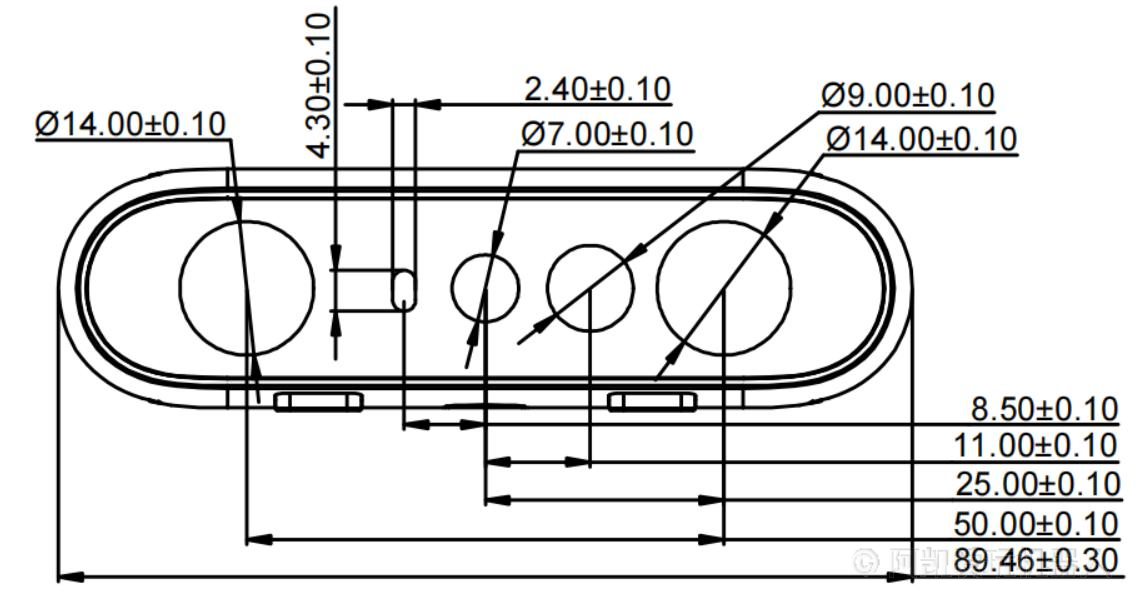
背视图尺寸标注:
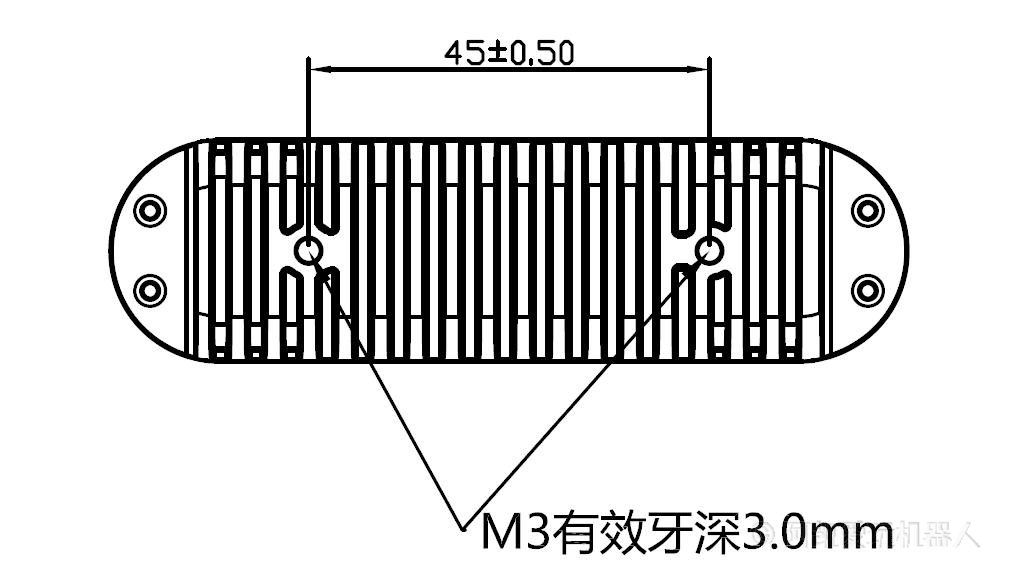
Gemini335的背孔固定孔位与Gemini2以及Realsense的D415/D435都是一致的。孔位是M3,孔距是45mm。
购买相机后,我们可以提供Gemini335相机简化版本的STEP模型以及URDF模型。
2.8 硬件接口 / 驱动 / 供电 / 功耗
TypeC口,使用USB通信,免驱无需安装驱动。
端口要求:>=USB3.0,5V供电,最大电流>=1.5A
注:需要注意的是,电脑的USB3.0接口的最大电流为0.9A,USB3.1接口的最大电流是2A。因此如果你的是USB3.0端口,则需要配备5V独立供电相关设备,这样相机连接与图像获取才会稳定。
这部分的详细信息请见本章节的 USB基础知识与注意事项 。
相机功耗与 激光功率等级 / 分辨率 / IMU 都有关系,平均功耗在2.0-3.0W之间。
2.9 相机防护等级 防尘 / 防水 ?
-
Gemini335:IP5X防尘等级,不防水。
前提条件:需插入 USB Type-C 线材,并拧紧螺丝,且不使用多机同步 8-pin 接口
-
Gemini335L:IP65防护等级。
前提条件:不使用多机同步 8-Pin 接口
关于防护等级的说明:
IP5X防尘等级
- 防止外部物体进入相机
- 不能完全防止灰尘进入相机内部,但进入灰尘后不影响正常使用
IP65防护等级
-
防止短时间持续的冲水
只是短时间哦,不可以在水下用。
-
完全防止灰尘进入相机内部。
2.10 多机信号同步问题
Gemini335支持多机信号同步,相机一侧有专门的排查接口,多机硬件同步需要借助额外的信号同步器,需要单独购买。
详情见
第9章.附录/Gemini2多机数据同步
2.11 供应商识别码 (VID) 和设备识别码 (PID)
Gemini335系列支持标准的UVC协议,因此不需要安装额外的驱动。
如果你是Linux下使用,需要配置奥比中光相的 USB设备权限 。
| 3D相机型号 | 供应商识别码 (VID) | 设备识别码 (PID) |
|---|---|---|
| Gemini 335 | 0x2BC5 | 0x0800 |
| Gemini 335L | 0x2BC5 | 0x0804 |
3. 相机型号对比与选择问题
3.1 Gemini335 与 Gemini335L 我选哪个 ?
Gemini335与Gemini335L 在滤波片还有工作距离上是有区别的。
- Gemini335 :滤波片全通。主要面相于室内与半户外场景,主要用于近距离拍摄,例如机械臂视觉抓取/面部三维重建等。
- Gemini335L :滤波片通过可见光+近红外光。面向户外+大型机器人应用场景,主要侧重远距离拍摄,例如:AMR、巡检机器人、无人机的SLAM导航等等。
注:在最新的奥比体系里,好像把Gemini335L的红外滤波片拿走了。Gemini335+红外滤波片变成Gemini336,Gemini335L+红外滤波片变成Gemini336L。
3.2 Gemini335 与 Gemini2 之间的主要区别 ?
Gemini2已经不推荐使用了,因为Gemini335效果更好。
Gemini335与Gemini2外观上是完全一样的。
Gemini2系列存在的问题
- Gemini2不支持主被动融合双目成像
- Gemini2不能用于拍摄金属/塑料反光问题
- Gemini2不能用于拍摄半透明物体
- Gemini2小物体拍摄,点云缺失
- Gemini2的USB3.0的电路存在问题 (推测) ,导致经常存在明明用的是USB3.0的线,识别出来是USB2.0。相机连接与图像获取没有Gemini335稳定。
- Gemini2L没有滤波片,不能用于户外强光场景。Gemini335L可以
那Gemini335软件层面上与Gemini2有什么区别呢?
- 首先Gemini335与Gemini2的软件不完全兼容,我们已经完成了Gemini335的pyorbbecsdk案例的适配以及我们自研的阿凯机器人工具箱的适配。
- Gemini335不支持硬件对齐 (HW D2C),Gemini2支持
- Gemini335不支持彩图与深度图同步,Gemini2和Gemini335L支持彩图与深度图的同步。
- 他们支持的深度引擎类型与名称都不一样。
3.3 Gemini335跟Astra系列之间的主要区别 ?
Astra系列奥比中光已经停产了,是奥比第一代3D相机。如果你是用在教育级/玩具级的SLAM小车上,或预算有限只够采购Astra Pro Plus的情况,或许还可以考虑选低成本的Astra Pro Plus(这是我们店铺目前还在销售的唯一一款Astra系列相机)。
Astra分辨率低,深度图成像效果不好,体积大,点云绝对定位精度差。
预算充足的情况下,建议选择 Gemini335 / Gemini335L 。
4. 软件与技术支持
4.1 相机的软件生态 ?
相机有自己的上位机软件OrbbecViewer。
相机支持多种开发语言,主要有C++ / Python / ROS1 / ROS2 。
具体可以看本章节的 Gemini335官方软件生态与独家教程获取方法。
4.2 我可以学会3D相机使用么?
这个看个人,你首先需要掌握python编程语言。有一定的工程开发能力,有文档阅读能力。
我们做的工作是尽可能的降低3D相机二次开发的门槛,编写了易用的SDK以及丰富的入门案例。
我们不对用户的学习效果做任何保证,也不会回答例如 " 我可以多久入门 ? " 这种问题。
注意事项 :
- 阿凯目前只提供自研Python Open3D SDK以及奥比中光官方Python SDK (pyorbbecsdk) 的相关技术支持。
- 奥比中光的其他语言版本需要自己对照官方文档学习,由奥比中光官方提供技术支持。
4.3 相机有xxx的功能么?
相机SDK只负责采集图像/点云,以及相机参数配置。不涉及特定行业的解决方案,这部分你需要自己二次开发/找专门的集成商去做定制,不在我们的技术支持范围内。
4.4 我还需要去做相机标定么?
相机固件内置相机内参与畸变系数,相机出厂会做专业的相机标定。通过pyorbbecsdk可以直接读取相机内参与畸变系数。所以不需要也不建议自己去做相机标定。
4.5 相机手眼标定的标定板选哪种?
对于Gemini335相机+机械臂的这个应用场景,涉及手眼标定。推荐使用我们店铺在销售的ArucoTag标定板去做手眼标定。
原因是RGB相机在近距离拍摄(小于40cm拍摄距离)时, 彩图都是稍微有一点点糊的。所以不适合使用特别多细节的标定板,我们开发了ArucoTag+点云的姿态矫正算法,可以解决ArucoTag纯2D视觉下Z轴朝向与坐标的波动问题。
标定板采购链接: 工业棋盘格相机标定板光学机器视觉计算机氧化铝玻璃片手眼Aruco
如果需要其他类型的标定板, 我们也支持定制。
4.6 其他可能会用到的配件产品
下面的配件均可以在我们淘宝店铺 阿凯爱玩机器人 进行购买。