§ 1.5 自适应二指夹爪-运动学
1. 连杆尺寸
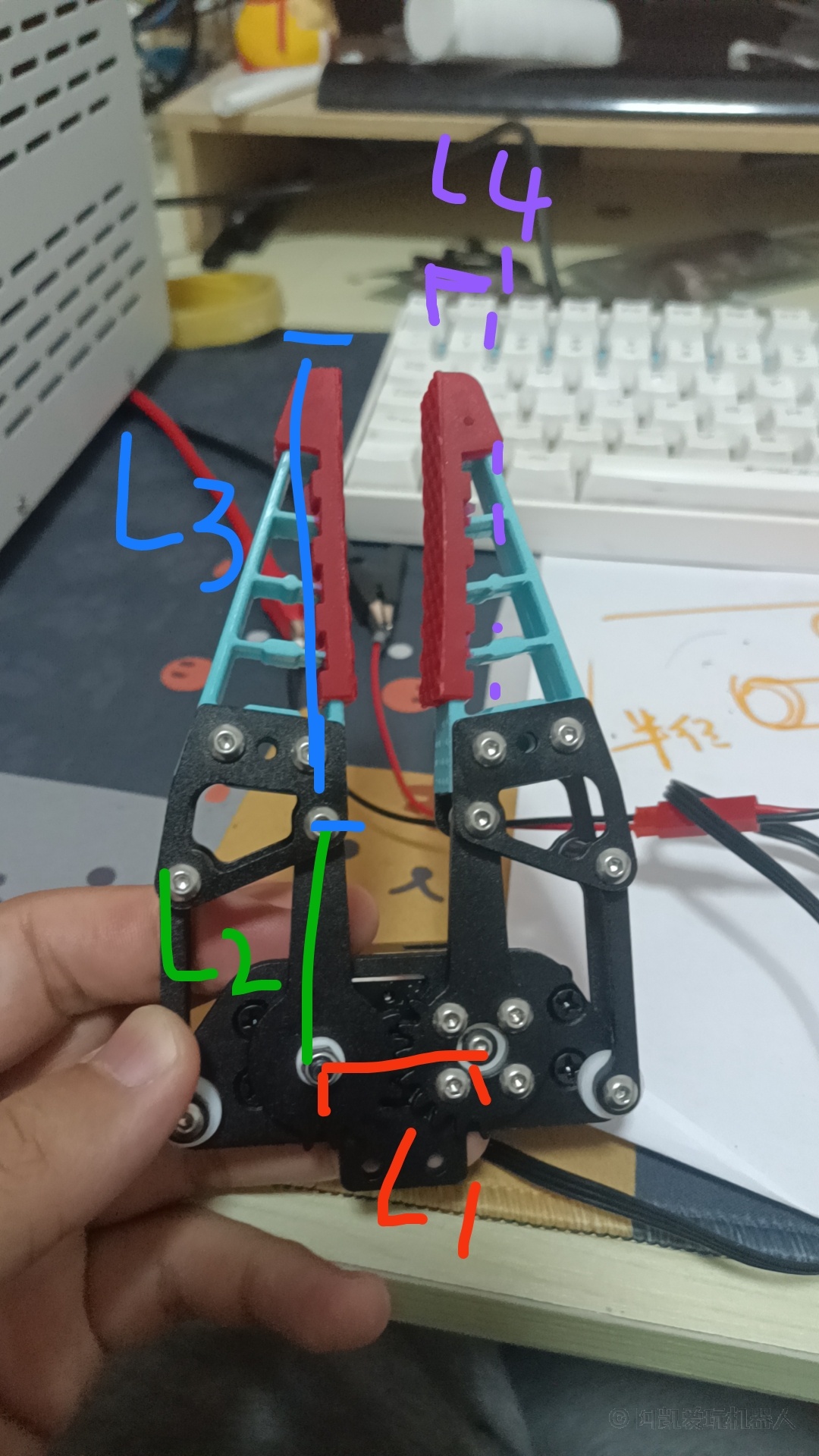
| 连杆符号 | 尺寸 (单位mm) |
|---|---|
|
|
25.0 |
|
|
35.0 |
|
|
68.94 |
|
|
7.0 |
2. 关节坐标系定义
以左侧夹爪转轴作为夹爪关节坐标系。
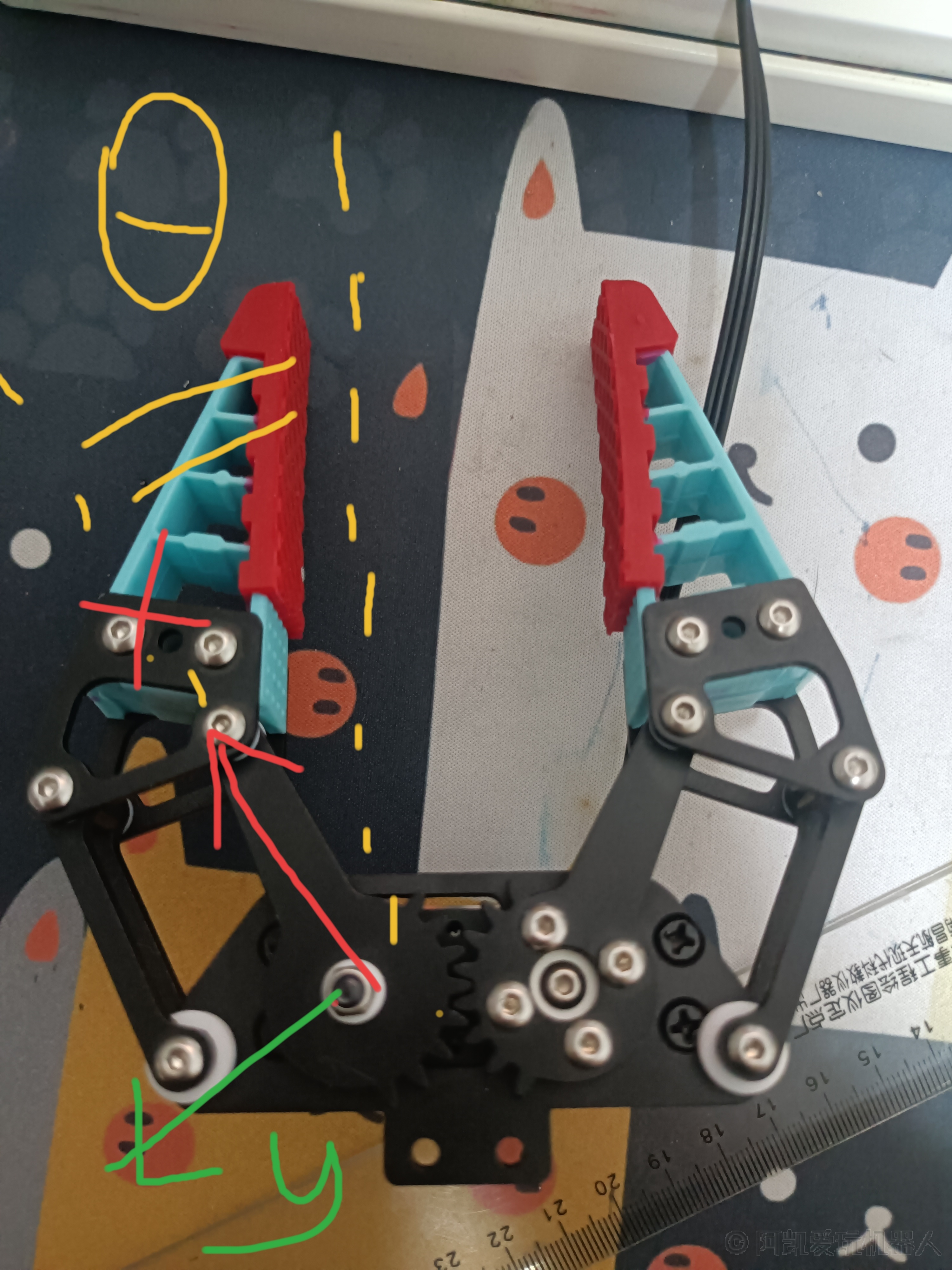
3. 夹爪坐标
夹爪基坐标系

4. 夹爪正向运动学
夹爪张开宽度
夹爪张开距离
假定机械臂基坐标系与
左侧夹爪在夹爪基坐标系下的坐标
工具中心点
5. 夹爪逆向运动学
根据张开距离
根据
进一步整理:
6. 夹爪关节标定
测量三个数据
定义舵机原始位置为
| 符号 | 描述 | 单位 |
|---|---|---|
|
|
夹爪闭合时的舵机原始度数 | 舵机ADC采样值 |
|
|
夹爪张开距离1 | mm |
|
|
夹爪张开距离1时的舵机原始度数 | 舵机ADC采样值 |
通过逆向运动学,可以计算得到
夹爪闭合时的夹爪关节角度:
夹爪张开距离1时的夹爪关节角度:
定义关节角度