配置运动控制器的IP地址
访问机械臂Web APP界面, 在
系统设置
/
通用设置
中可以对机械臂运动控制器的IP进行配置。
注: 仅在必要的情况下, 才去修改IP地址。 非必要不修改, 因为你也很容易忘记之前设定的机械臂IP地址。
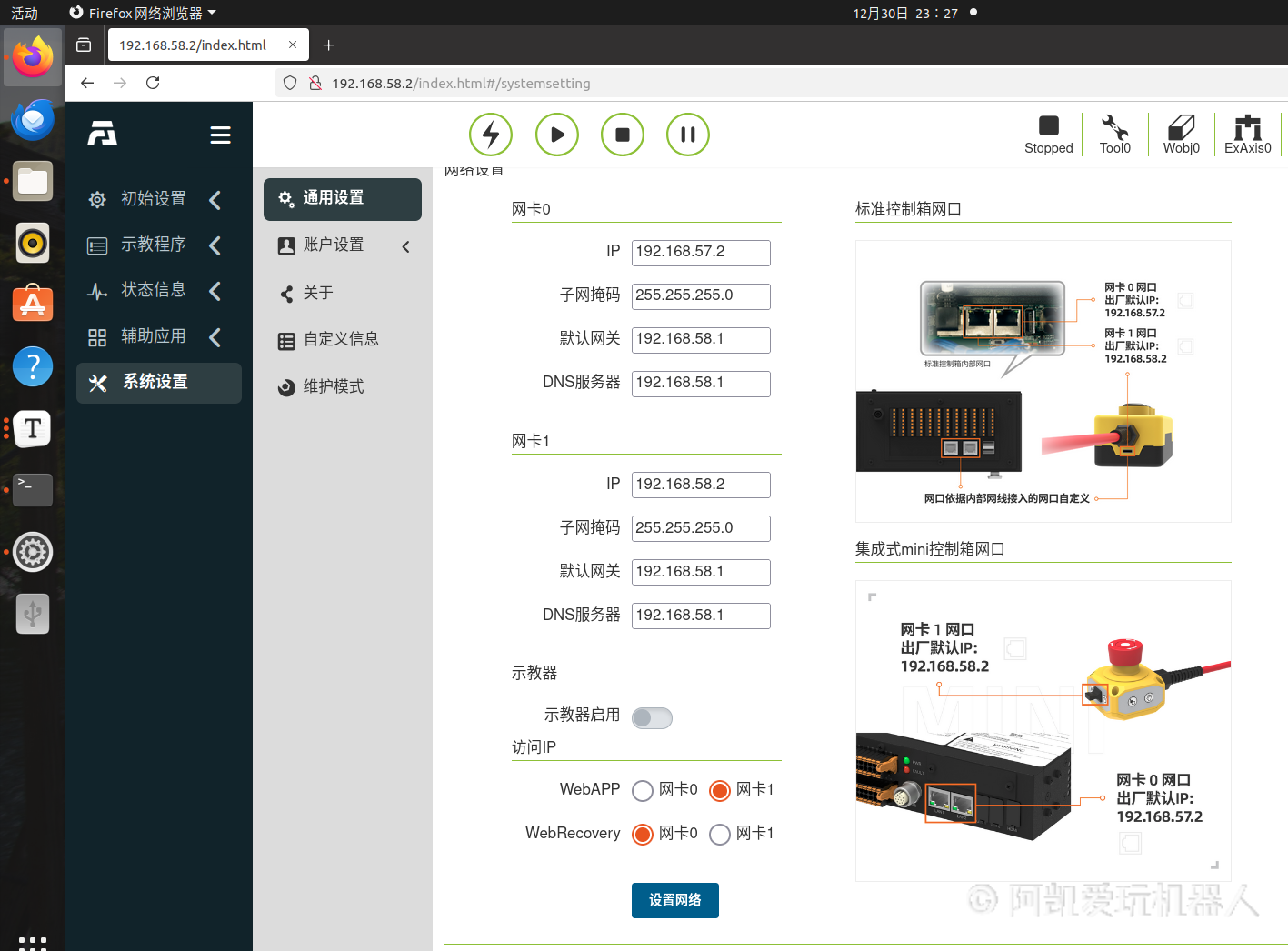
目前出货的机械臂都是 集成式mini控制箱网口 ,看右下角这个示意图。
机械臂本身有两个网卡, 可以分别配置为Web APP, 以及Web Recovery两个用途。 Web App就是我们正常使用的机械臂示教/配置界面, 而Web Recovery主要用于设备降级/重置。
-
机械臂急停开关(按钮盒)是网卡1的网口, 默认IP地址是
192.168.58.2, 默认用于Web APP。 -
运动控制器盒子上面的两个网口是网卡0的网口, 默认IP地址是
192.168.57.2,默认用于Web Recovery 。
我们也可以通过配置界面, 把Web APP的网口改为网卡0, 网线一端接机械臂运动控制器, 另外一端接电脑。
对于单独购买了机械臂示教器的用户,如果想通过示教器访问Web APP, 可以在配置界面打开
示教器启用
按钮。