前言
1. 机械臂视觉抓取流程
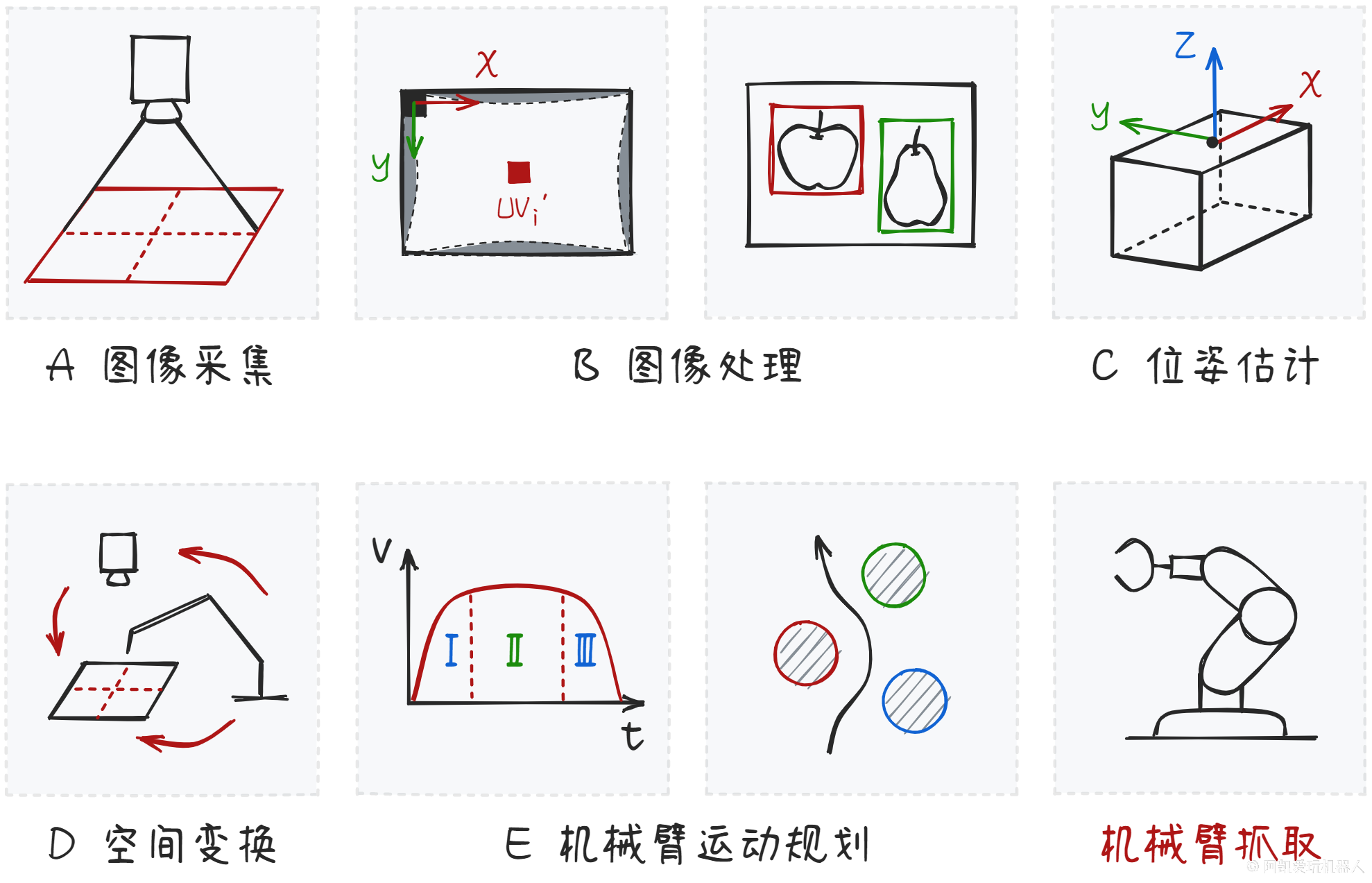
- A. 图像采集 :摄像头拍摄工作台的画面。
- B. 图像处理 :去除图像畸变,检测物体在图像中的位置,以及物体的其他图像特征。
- C. 位姿估计 :根据图像特征得到物体在工作台/摄像头坐标系下的位姿。
- D. 空间变换 :将物体在工作台坐标系下的位姿转换为机械臂坐标系下的位姿。
- E. 机械臂运动规划 :驱动机械臂执行一段轨迹,将物体抓取到特定的地方,并保证末端平滑运动。
另外,在实现机械臂视觉抓取之前,需要做一些前置工作:
-
F. 相机标定 :通过相机标定得到相机的内部参数,包括相机畸变系数与内参矩阵。
畸变系数用于去除图像畸变 (步骤B),内参矩阵用于物体的位姿估计 (步骤C)。
-
G.手眼标定 :手眼标定是为了明确机械臂基坐标系与相机坐标系/工作台坐标系之间的空间变换。
得到的变换矩阵用于空间变换 (步骤D)。
2. 刚体空间变换
刚体空间变换包含两个核心要素: 物体位姿描述 以及 物体在不同坐标系下的变换 。
步骤C、D、E、F、G都依赖刚体空间变换的知识。
3. 机械臂运动学
因此想要实现控制机械臂末端移动到指定的位置,就需要借助 机械臂运动学 与 机械臂轨迹规划 的知识。
机械臂运动学是机械臂轨迹规划的前置知识点。
- 机械臂正向运动学 :已知机械臂各关节角度,求解此时机械臂末端的位姿。
- 机械臂逆向运动学 :已知机械臂末端位姿,求解此时机械臂各关节的角度。
如果是自己设计机械臂或者设计机械臂末端,则需要自己推导运动学公式。
如果是购买机械臂成品,则可以直接调用机械臂厂家提供的API。
4. 运动规划
运动规划包含 轨迹规划 和 路径规划 两个板块。
4.1 轨迹规划
如果是自己开发机械臂的运动控制器,需要自己实现轨迹规划。让机械臂末端/关节完成从A点到B点的平滑运动。
如果是使用成品的运动控制器或者成品机械臂,一般情况下不需要自己写基础的轨迹规划部分。可以在PC端规划更高级的运动曲线,然后分段发送给运动控制器。
还可以添加时间最短/加加速度最小等其他轨迹规划的约束,实现轨迹最优化。
轨迹规划主要分为 关节空间 与 笛卡尔空间 下的轨迹规划。
关节空间下的轨迹规划,每个关节都是相对独立的,是对关节的角度进行规划,不关心末端的轨迹。
笛卡尔空间下的轨迹规划,指的是对工具坐标系在机械臂基坐标系下的轨迹进行规划,让机械臂末端从位姿A到位姿B实现平滑的过渡。
4.2 路径规划
如果机械臂的实际工况比较复杂,需要根据机械臂本体、周围环境与工件的情况,规划出一条无碰撞的轨迹。这时就需要做机械臂的路径规划,需要在PC端/工控机端实现。
5. 轨迹跟踪
轨迹规划出来之后,到实际的执行层面,则称之为轨迹跟踪。
如果是 闭环控制 ,可以设计运动控制器,让机械臂末端跟踪预设的轨迹。当发生扰动时,还可以尽快恢复轨迹的执行。
如果是 开环控制 ,则可以按照特定的时间间隔发送控制指令,例如位置 / 位置+速度 / 位置+速度+加速度。
6. 相机标定
相机镜头都是有畸变的,因此要先做一下相机标定。相机标定后,得到相机的 内参矩阵 与 畸变系数 。
利用相机标定得到的畸变系数,去除图像的畸变。畸变去除后,则畸变系数为0,重新计算得到新的相机内参。
7. 图像处理
图像处理的目的是提取物体的特征信息,用于物体的位姿估计。
-
通过 透视变换 ,对工作台的图像进行梯形校正,得到工作台的正视图。
-
通过 目标检测 算法 (例如YoloV5),可以得到物体在画面中的矩形框。
-
通过 图像分割 算法 (例如SegNet),可以得到每个像素点对应的类型。
-
通过 实例分割 算法 (例如Mask-RCNN),可以得到物体的轮廓。
进一步,还可以提取轮廓图二值化图像的外接矩形。
-
通过 关键点匹配 算法,可以得到模板图像中的像素点在当前画面中的像素位置。
以及模板图像四个角点在采集图像中的像素坐标。
上述方法都还是平面图像中的图像处理,还可以通过深度摄像头获得工作台的点云数据。
- 通过 点云分割 ,去除环境点云,得到物体的点云数据。
8. 位姿估计
通过图像信息,获取工件在工作台上/相机坐标系下的位姿。
-
对于平面抓取的简单情况,可以根据物体在图像中像素的中心,提取物体在工作台上的坐标值。
使用物体二值化图像的最小外接矩形,则可以提取得到物体在工作台上的偏航角。
-
可以根据关键点模板匹配得到2D像素点,以及该点在物体坐标系下的3D坐标。
使用 PNP算法 来估计物体的位姿。
-
使用深度学习模型,输入工作台图像,直接获取物体的6DoF的位姿估计。
如果是点云数据:
-
对物体上表面进行拟合,提取上表面中心点三维坐标以及法向量。
-
使用在工作台上采集的物体点云数据与模板点云数据,进行点云配准得到物体位姿。
点云配准 是3D点与3D点之间的空间变换, 常用的配准算法有 ICP 、 CPD 、 ECPD 、 FilterReg 。
9. 手眼标定
前面已经获得了工件在工作台上的位姿,那么怎么让机械臂知道要到哪里抓取呢?
这时就需要明确机械臂基坐标系到相机坐标系,或者机械臂基坐标系到工作台坐标系之间的变换关系。
这里可以使用一种简单,高精度的实用算法 九点标定法 。在工作台上选取9个点,可以得到9点分别在工作台坐标系下的3D坐标。控制机械臂的末端依次到达工作台,得到机械臂到达9点时末端位置的3D坐标。 由此就得到了9个3D点对,使用ICP算法可以求解得到机械臂坐标系到工作台坐标系之间的空间变换。
另外还可以使用经典的 TSAI手眼标定法 , 它同时适用于眼在手上与眼在手外两种情况。
10. 视觉抓取
在完成手眼标定之后,就可以将工件在工作台上的位姿,转换为工件在机械臂基坐标系下的位姿了。
对于平面抓取这种简单的情况来讲,可以使用门式轨迹规划。
操作步骤如下:
- 到达物体正上方
- 夹爪落下,夹取物体
- 抬起来
- 移动到目标位置的正上方 (中间的轨迹可以是直线,也可以是任意轨迹)
- 下移
- 释放夹爪,物体掉落。
再复杂一点,需要考虑物块此时的姿态,调整工具的姿态。同时要根据夹爪类型,机械臂自由度这些条件来制定抓取策略。
如果是夹爪+3D点云的情况要更复杂一些,需要根据点云信息,推断出合适的下爪点,寻找一条无碰撞轨迹。